本章将对操作系统可使用的内存进行管理,有两种管理粒度:按页分配和任意粒度分配。
-
按页分配有助于我们实现下一章的页表
-
任意粒度分配则属于动态内存分配,类似于 C 语言的 malloc 函数。
-
本章将先实现按任意粒度(64Bytes)的动态内存分配
-
再实现按页分配的页帧分配
3.1 Buddy System
Buddy System Allocation 是一种经典的内存分配算法,同时也是Linux 内核底层所使用的内存分配算法,动态内存分配也打算使用此算法来管理堆内存。
1、伙伴分配的实质就是一种特殊的“分离适配”,即将内存按2的幂进行划分,相当于分离出若干个块大小一致的空闲链表,搜索该链表并给出同需求最佳匹配的大小。
- 优点是快速搜索合并(O(logN) 时间复杂度)以及低外部碎片(最佳适配);
- 缺点是内部碎片,因为按2的幂划分块,如果碰上分配 66 个单位,那么必须划分 128 单位的块。
2、算法描述
- 分配内存
- 寻找大小合适的内存块(大于等于所需大小并且最接近2的幂)
- 如果找到了,就返回这个块
- 否则,分出合适的内存块
- 对半分开大于所需大小的空闲内存块
- 如果分到最低限度,就返回这个块
- 返回到步骤 1(继续寻找合适大小的块)
- 释放内存
- 释放该内存块
- 寻找相邻的内存块,查看其是否已被释放
- 如果被释放了,就合并这两个块,重复上述操作直到遇到未被释放的相邻块,或者达到上限。
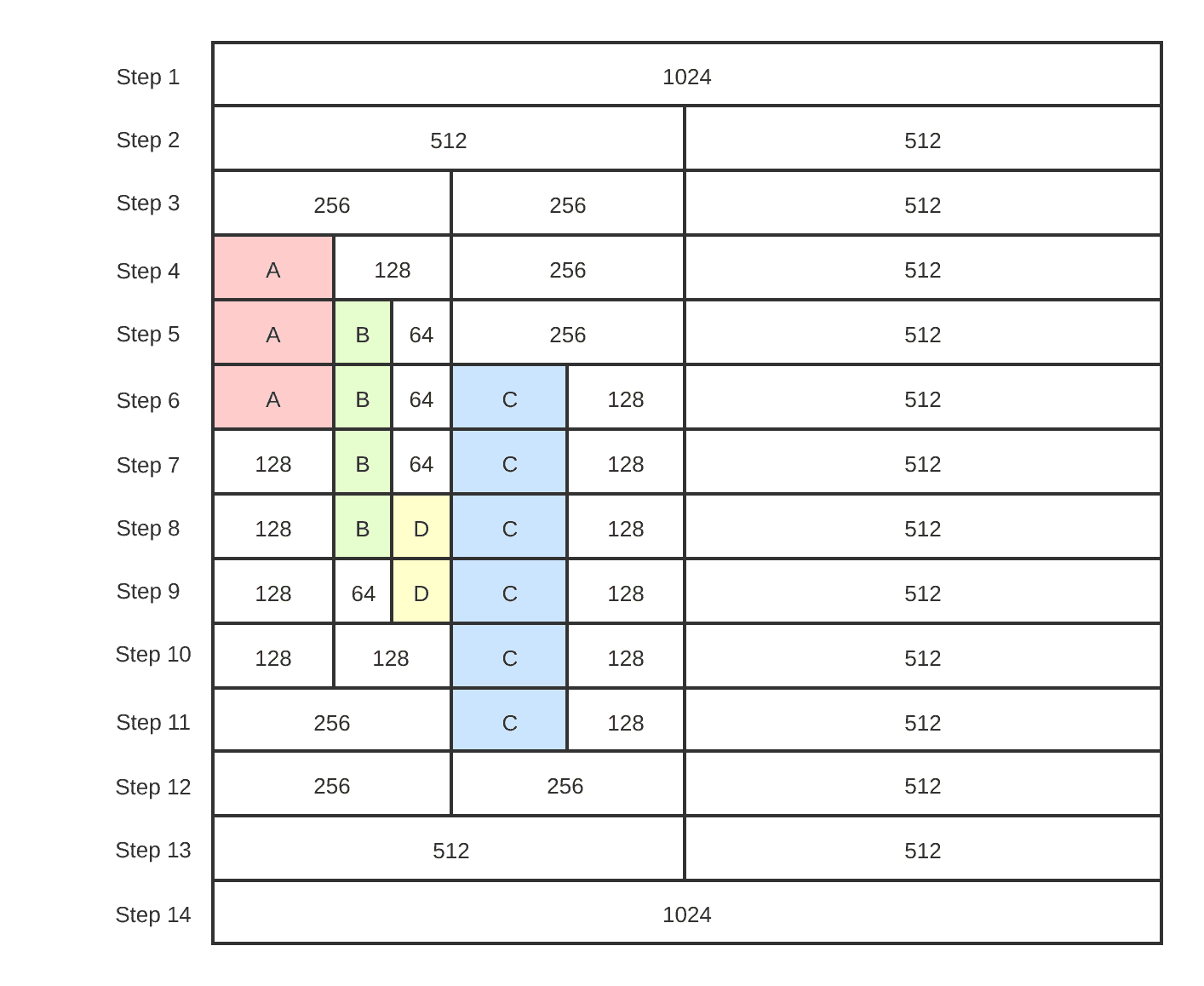
3、算法图解,只需要看一下图解10个步骤,对应例子和上述的算法描述,就能够理解这个算法了。这个例子中,我们要进行一下步骤:
- 分配一个 100 单位大小的块 A
- 分配一个 60 单位大小的块 B
- 分配一个 100 单位大小的块 C
- 释放块 A
- 分配一个 30 单位大小的块 D
- 释放块 B
- 释放块 D
- 释放块 C
总内存空间 1024 个单位大小,最小分配单位为 64 单位。图示如下:
4、算法实现
- 我们使用一棵二叉树来存储每一级范围内的最大连续空闲块个数,譬如上面的例子,二叉树的第一层就存储了整块 1024 单位的范围内的最大连续空闲块个数,第二层两个节点就分别存储了两个 512 单位块范围内的最大连续空闲块个数。二叉树的最下层就代表了每个具体的块是否被使用了,也就是 0 和 1。当然,这些个数都是 2 的幂级数。
// kernle/heap.c
/*
* Buddy System Allocation 的具体实现
* 使用一棵数组形式的完全二叉数来监控内存
*/
struct
{
int size; /* 管理的总块数 */
int longest[BUDDY_NODE_NUM]; /* 每个节点表示范围内最大连续空闲块个数 */
// 二叉树总节点个数 BUDDY_NODE_NUM = size*2 - 1
} buddyTree;- 初始化二叉树
// 二叉树初始化
void
buddyInit(int size)
{
buddyTree.size = size; // 管理的总块数
int nodeSize = size << 1; // 因为下为对于i=0节点也会判断为2的幂,所以先乘2来抵消下文的除2
int i;
/* 初始化每个节点,此时每一块都是空闲的 */
for(i = 0; i < (size << 1) - 1; i ++) {
// 若当前节点为2的幂,则除以2
if(IS_POWER_OF_2(i+1)) {
nodeSize /= 2;
}
buddyTree.longest[i] = nodeSize;
// 数组存储例:1024 512 512 256 256 256 256 128 128...
}
}- 分配块:选择满足条件的最小的分叉。如果左右子树都满足条件(必然有一个会满足),就会选择值最小的那个子树。
/*
* 试图分配 size 大小的块,返回空闲块的第一块在堆上的偏移
* 该版本的分配过程是从上往下搜索,寻找大小最合适的节点
*/
int
buddyAlloc(int size)
{
int index = 0;
int nodeSize;
int offset;
/* 调整内存块数量到 2 的幂 */
if(size <= 0) size = 1;
else if(!IS_POWER_OF_2(size)) size = fixSize(size);
/* 超过总内存分配大小 */
if(buddyTree.longest[0] < size) {
return -1;
}
/* 从二叉树根开始,寻找大小最符合的节点 */
for(nodeSize = buddyTree.size; nodeSize != size; nodeSize /= 2) { // 不断减小nodeSize,直到和size一样大
int left = buddyTree.longest[LEFT_LEAF(index)]; // 左子节点索引结果,即大小
int right = buddyTree.longest[RIGHT_LEAF(index)]; // 右子结点索引结果,即大小
/* 优先选择最小的且满足条件的分叉,小块优先,尽量保留大块 */
if(left <= right) {
if(left >= size) index = LEFT_LEAF(index); // 大小满足,继续向下找
else index = RIGHT_LEAF(index);
} else {
if(right >= size) index = RIGHT_LEAF(index);
else index = LEFT_LEAF(index);
}
}
/*
* 将该节点标记为占用
* 注意这里标记将该节点的下级节点,便于回收时确定内存块数量
*/
buddyTree.longest[index] = 0;
/* 获得这一段空闲块的第一块在堆上的偏移 */
offset = (index + 1) * nodeSize - buddyTree.size;
/* 向上调整父节点的值,即空闲个数 */
while(index) {
index = PARENT(index);
buddyTree.longest[index] =
MAX(buddyTree.longest[LEFT_LEAF(index)], buddyTree.longest[RIGHT_LEAF(index)]);
}
return offset;
}- 回收块:注意我们在分配块的时候,只将该块标记为占用,而没有将其子块标记。譬如,我们分配一个 128 单位的块,仅仅是表示该块的节点被标记,但是其子块:两个 64 单位的块的节点仍然被标记为未占用。这种做法不会影响块的分配,因为寻找空闲块是自顶向下,从根节点开始寻找的。同时,它还有利于根据块号回收区间。从最小块向上回溯,一直回溯到第一个被标记为全部占用的节点,就是我们当时分配出去的节点。
- 回收的过程很简单,将这个节点改为未占用,并继续向上回溯,修改上级节点的占用情况。
/* 根据 offset 回收区间 */
void
buddyFree(int offset)
{
int nodeSize, index = 0;
nodeSize = 1;
index = offset + buddyTree.size - 1;
/*
* 向上回溯到之前分配块的节点位置
* 由于分配时没有标记下级节点,这里只需要向上寻找到第一个被标记的节点就是当时分配的节点
*/
for( ; buddyTree.longest[index]; index = PARENT(index)) { // 直到被标记为0则退出
nodeSize *= 2;
if(index == 0) { // 到根节点还没有被占用,直接退出
return;
}
}
buddyTree.longest[index] = nodeSize; // 恢复空闲大小
/* 继续向上回溯,合并连续的空闲区间,直到根节点 */
while(index) {
index = PARENT(index);
nodeSize *= 2;
int leftLongest, rightLongest;
leftLongest = buddyTree.longest[LEFT_LEAF(index)];
rightLongest = buddyTree.longest[RIGHT_LEAF(index)];
// 如果左、右根节点的空闲大小之和等于父节点空闲大下
if(leftLongest + rightLongest == nodeSize) {
buddyTree.longest[index] = nodeSize; // 则合并(修改父节点最大连续大小)
} else {
buddyTree.longest[index] = MAX(leftLongest, rightLongest); // 否则父节点取子结点最大连续大小
}
}
}注意:此处除了上述新建的kernel/heap.c文件,还建立了kernel/consts.h头文件来存放一些系统常量,如下所示:
// kernel/consts.h
#ifndef CONSTS_H
#define CONSTS_H
/* 动态内存中定义堆的相关常量 */
#define BUDDY_NODE_NUM 0x3ffff /* 二叉树节点个数 */
#endif3.2 动态内存分配
1、实现 kalloc
- 我们可以直接声明一个 8M 大数组,作为堆空间,用于动态内存分配,还定义一些构造 Buddy System 所使用的常量。
// kernel/consts.h
/* 动态内存中定义堆的相关常量 */
#define KERNEL_HEAP_SIZE 0x800000 /* 堆空间大小 */
#define MIN_BLOCK_SIZE 0x40 /* 最小分配的内存块大小 */
#define HEAP_BLOCK_NUM 0x20000 /* 管理的总块数 */
#define BUDDY_NODE_NUM 0x3ffff /* 二叉树节点个数 HEAP_BLOCK_NUM*2-1 */
// kernel/heap.c
static uint8 HEAP[KERNEL_HEAP_SIZE];- 按照 C 语言的接口,实现两个函数。分别是
usize *kalloc(uint32 size)和void kfree(void *ptr)。其实内部主要就是调用上一节实现的buddyAlloc()和buddyFree()函数,只是对输入数据进行了一些处理而已。 kalloc()函数首先获取所需分配的内存块数,之后就调用buddyAlloc(),返回的分配的内存空间的第一个内存块号。- 我们可以将其转换成相对于堆空间起始地址的偏移,进一步得到实际的地址。但是在返回之前,我们首先需要清空这一块内存,将其内容全写为 0。
// kernle/heap.c
/*
* 获得大于等于某个数的最小的 2 的幂级数
* 算法来源于 Java HashMap 实现
*/
int
fixSize(int size)
{
int n = size - 1;
n |= n >> 1;
n |= n >> 2;
n |= n >> 4;
n |= n >> 8;
n |= n >> 16;
return n + 1;
}
/*
* 在堆上分配内存
* 输入:size,单位为 Byte
* 输出:分配空间的起始地址
*/
void *
kalloc(int size)
{
if(size <= 0) return 0;
uint32 n;
// 计算需要分配的块数
if((size && (MIN_BLOCK_SIZE-1))) // 分配块数 与 最小分配块数-1 相与不为零,说明右余数,块数+1
n = size / MIN_BLOCK_SIZE + 1;
else
n = size / MIN_BLOCK_SIZE;
// 分配块,得到偏移地址(单位为MIN_BLOCK_SIZE)
int block = buddyAlloc(n);
if(block == -1) panic("Malloc failed!\n");
/* 清零被分配的内存空间 */
int totalBytes = fixSize(n) * MIN_BLOCK_SIZE; // 计算所分配的大小,单位bytes
// 计算分配空间的起始地址(usize),声明指向一个字节(uint8)的指针指向这个地址
uint8 *beginAddr = (uint8 *)((usize)HEAP + (usize)(block * MIN_BLOCK_SIZE));
int i;
for(i = 0; i < totalBytes; i ++) { // 逐字节清零分配的内存空间
beginAddr[i] = 0;
}
return (void *)beginAddr;
}2、实现 kfree()
- 回收的过程就很简单了,我们将传入的地址转换成相对于堆起始地址的偏移,进而转换成块号,最后调用
buddyFree()即可
/*
* 回收被分配出去的内存
* 输入:回收空间的起始地址
*/
void
kfree(void *ptr)
{
// 验证地址是否在堆空间
if((usize)ptr < (usize)HEAP) return;
if((usize)ptr > (usize)HEAP + KERNEL_HEAP_SIZE - MIN_BLOCK_SIZE) return;
/* 相对于堆空间起始地址的偏移 */
usize offset = (usize)((usize)ptr - (usize)HEAP);
buddyFree(offset / MIN_BLOCK_SIZE);
}3、测试内存分配
- 我们定义一个
initHeap()函数,并且在其中调用buddyInit() - 来编写一个测试函数,我们的最小分配单位和上一届中的那个例子一致,都是 64
// kernel/heap.c
// 初始化堆空间
void
initHeap()
{
buddyInit(HEAP_BLOCK_NUM);
}
void
testHeap()
{
printf("Heap:\t%p\n", HEAP);
void *a = kalloc(100);
printf("a:\t%p\n", a);
void *b = kalloc(60);
printf("b:\t%p\n", b);
void *c = kalloc(100);
printf("c:\t%p\n", c);
kfree(a);
void *d = kalloc(30);
printf("d:\t%p\n", d);
kfree(b);
kfree(d);
kfree(c);
a = kalloc(60);
printf("a:\t%p\n", a);
kfree(a);
}- 在
main()函数中调用
void main()
{
extern void initInterrupt(); initInterrupt(); // 设置中断处理程序入口 和 模式
extern void initTimer(); initTimer(); // 时钟中断初始化
// asm volatile("ebreak" :::); // 手动触发一个中断
// printf("return from ebreak\n");
extern void initHeap(); initHeap();
extern void testHeap(); testHeap();
while(1) {}
}- 可以得到如下输出结果(与上图示分配结果一致):
==== Init Interrupt ====
Heap: 0x0000000080311000
a: 0x0000000080311000
b: 0x0000000080311080
c: 0x0000000080311100
d: 0x00000000803110c0
a: 0x00000000803110004、管理内存开销分析
- 采用 Buddy System Allocation 算法需要维护 BuddyTree,我们可以来分析一下其占用的内存空间。对于本节所使用的8M堆空间(2^23)
- 若设置最小分配的块大小为 16 Byte = 2^4 Byte,则总共有 2^19 个块,管理的满二叉树有 2^20 - 1 个结点,每个结点都是四字节大小的无符号整数,则占用空间 2^22 Byte = 4M,我们管理一个 8M 的空间就需要多花费 4M 的内存!这有点得不偿失。
- 若最小分配的块大小为 64Byte = 2^6 byte。则只需要 2^20 Byte = 1M,勉强算在可接受范围内了。
3.3 内存按页分配框架
1、物理地址是用于访问物理内存的,物理内存可以看作一个很大的字节数组,而物理地址就是它的下标。但事实上,物理地址不仅仅能访问物理内存,很多指令集架构提供了一种技术 MMIO(Memory Mapped I/O),可以将外部设备映射到物理地址空间,这样我们访问外设时就可以像访问物理内存一样简单了。
- 在 OpenSBI 初始化时,会自动探测所有的外设(包括物理内存)的地址,并将结果保存在设备树(DTB,Device Tree Blob)中,供操作系统使用。 QEMU 模拟的 RISC-V Virt 的物理地址空间布局可以在 QEMU 的代码中查找到:
static const struct MemmapEntry {
hwaddr base;
hwaddr size;
} virt_memmap[] = {
[VIRT_DEBUG] = { 0x0, 0x100 },
[VIRT_MROM] = { 0x1000, 0xf000 },
[VIRT_TEST] = { 0x100000, 0x1000 },
[VIRT_RTC] = { 0x101000, 0x1000 },
[VIRT_CLINT] = { 0x2000000, 0x10000 },
[VIRT_PCIE_PIO] = { 0x3000000, 0x10000 },
[VIRT_PLIC] = { 0xc000000, VIRT_PLIC_SIZE(VIRT_CPUS_MAX * 2) },
[VIRT_UART0] = { 0x10000000, 0x100 },
[VIRT_VIRTIO] = { 0x10001000, 0x1000 },
[VIRT_FLASH] = { 0x20000000, 0x4000000 },
[VIRT_PCIE_ECAM] = { 0x30000000, 0x10000000 },
[VIRT_PCIE_MMIO] = { 0x40000000, 0x40000000 },
[VIRT_DRAM] = { 0x80000000, 0x0 },
};- 我们可以不用关心前面的内容,只关心数组的最后一个元素,
VIRT_DRAM。这个元素描述的就是我们可以使用的 DRAM 物理内存,起始地址为 0x80000000,长度被定义为 0x0,实际上,这段内存的长度可以在启动 QEMU 时通过-m参数指定,默认是 128M。所以我们可以使用的物理内存地址范围为 ( 0x80000000, 0x88000000 )。
2、操作系统分配内存,多数情况下是以一个页,即连续的 4K 字节为单位分配的。每一个页都可以被一个物理页号(Physical Page Number,PPN)来唯一表示,通常一个物理页的页号是这个页的起始地址除以 4K,或者说,右移 12 位。一个物理页所表示的范围就是 [ PPN << 12, (PPN + 1) << 12 )(一个 Page table entire,PTE 由 PPN + Flags 组成)
- 在 kernel/memory.h 中定义一些常量
// kernel/memory.h
extern void kernel_end(); /* 内核所在内存空间结束的虚拟地址 */
#define PAGE_SIZE 4096 /* 页/帧大小 */
#define MEMORY_START_PADDR 0x80000000 /* 可以访问的内存区域起始地址 */
#define MEMORY_END_PADDR 0x88000000 /* 可以访问的内存区域结束地址 */
#define KERNEL_BEGIN_PADDR 0x80200000 /* 内核起始的物理地址 */
#define KERNEL_BEGIN_VADDR 0x80200000 /* 内核起始的虚拟地址 */kernel_end是我们在kernel.ld链接脚本中定义的一个符号,表示内核的结束地址,这里我们可以以外部函数的方式引用过来。目前,内核起始和结束的物理地址和虚拟地址相同。- 我们定义一个
FrameAllocator结构,用于真正进行物理页的分配和回收。 - 其中
Allocator结构体代表一种具体的分配/回收算法,定义如下。
// kernel/memory.h
/* 具体的页帧分配/回收算法实现结构体 */
typedef struct
{
usize (*alloc)(void); // 分配页帧的函数指针
void (*dealloc)(usize index); // 回收页帧的函数指针
} Allocator;
/* 页帧分配/回收管理器 */
typedef struct
{
usize startPpn; /* 可用空间的起始 */
Allocator allocator; /* 具体的分配/回收实现算法 */
} FrameAllocator;3、内存按页分配框架
- 接着我们定义一个全局的 FrameAllocator,并且实现一些全局的接口,如
allocFrame()和deallocFrame(),当然这些函数还是调用的具体实现算法 Allocator 的函数,仅仅是一层包装而已。allocFrame()函数还顺便把分配的物理页给清空了。
/* 全局唯一的页帧分配器 */
FrameAllocator frameAllocator;
/* 分配算法需要实现的三个函数 */
Allocator newAllocator(usize startPpn, usize endPpn);
usize alloc();
void dealloc(usize ppn);
// 初始化全局页帧分配器
void
initFrameAllocator(usize startPpn, usize endPpn)
{
frameAllocator.startPpn = startPpn; // 设置分配器的起始页帧号
frameAllocator.allocator = newAllocator(startPpn, endPpn); // 初始化页帧分配器
}
/*
* 分配一个物理页
* 返回物理页的起始地址
*/
usize
allocFrame()
{
// 分配一个物理页并计算地址
char *start = (char *)(alloc() << 12);
int i;
// 初始化页的每个字节为零
for(i = 0; i < PAGE_SIZE; i ++) {
start[i] = 0;
}
return (usize)start;
}
/*
* 回收一个物理页
* 输入为物理页的起始物理地址
*/
void
deallocFrame(usize startAddr)
{
dealloc(startAddr >> 12);
}- 下一节,我们来实现一个基于线段树的页帧分配算法,并真正地进行物理页分配。
3.4 基于线段树的页帧分配
1、本节将实现具体的页帧分配算法,其实就是实现三个函数:
// kernel/memory.c
// 分配算法的三个关键函数
Allocator newAllocator(usize startPpn, usize endPpn);
usize alloc();
void dealloc(usize ppn);2、将采用一棵非递归线段树来实现,和3.1节提到的 Buddy System Allocation 算法的结构非常类似,同样也是一棵二叉树管理 2 的幂级数长度的区间,只不过,我们并不要记录该区间上还有多少空闲页,因为我们一次只分配一页。这样,每个节点只需要记录一个 boolean(布尔值),即该区间上是否有空闲页。
- 假设需要有
MAX_PHYSICAL_PAGSE个物理页,实际上肯定不会用掉这么多空间,因为内核也占据了一部分可用内存的一部分,实际可分配的页会小于该值。
/* 最大可用的内存长度,从 0x80000000 ~ 0x88000000 */
#define MAX_PHYSICAL_PAGES 0x8000 // 页大小为4K
// 管理页栈分配的线段树结构
struct
{
uint8 node[MAX_PHYSICAL_PAGES << 1]; /* 线段树的节点,每个都表示该范围内是否有空闲页 */
usize firstSingle; /* 第一个单块节点的下标,即最后一层叶子节点的下标 */
usize length; /* 分配区间长度,表示可分配的页帧数量 */
usize startPpn; /* 分配的起始 ppn */
} sta;3、初始化线段树
- 初始化的过程很简单,传入的参数是要分配区间的起始 PPN 和结束 PPN,主要内容就是填充 node 数组。
// kernel/memory.c
// 初始化页帧分配器(线段数初始化)
Allocator
newAllocator(usize startPpn, usize endPpn)
{
sta.startPpn = startPpn - 1;
sta.length = endPpn - startPpn; // 设置页帧分配的区间长度
sta.firstSingle = 1;
// 找到合适的树大小,树的节点数量必须是2的幂
while(sta.firstSingle < sta.length + 2) { // 推测:+1是因为尾-头,头和尾本身也是节点;又+1是因为firstSingle要大于区间长度
sta.firstSingle <<= 1;
}
// 初始化线段树每个节点为1,表示已分配了
usize i = 1;
for(i = 1; i < (sta.firstSingle << 1); i ++) { // 完全二叉树总节点个数为管理节点数乘2
sta.node[i] = 1;
}
// 初始化叶子节点为0(线段树末端),表示页帧是空闲的
for(i = 1; i < sta.length; i ++) {
sta.node[sta.firstSingle + i] = 0;
}
// 构建线段树,将左右子节点的值与运算,如果左右子节点有一个是空闲的,那父节点也是空闲块
for(i = sta.firstSingle - 1; i >= 1; i --) {
sta.node[i] = sta.node[i << 1] & sta.node[(i << 1) | 1];
}
Allocator ac = {alloc, dealloc}; // 创建分配器
return ac;
}- 最后创建了一个
Allocator,传入了两个参数,分别是alloc函数和dealloc函数,就是我们下面要实现的。
4、分配页面
- 之前我们在3.2节动态内存分配那一节,专门要求要 best-fit 而不是 first-fit,以防止出现过多的外部碎片。然而这里,只是用 first-fit 就可以了,因为我们分配的单位固定是一个页,而如果内存区间有空余,那最小也是一个页大小。
// kernel/memory.c
/*
* 分配一个物理页
* 返回物理页号 PPN
*/
usize
alloc()
{
// 如果根节点已分配,表示没有空闲页
if(sta.node[1] == 1) {
panic("Physical memory depleted!\n");
}
// 查找空闲页
usize p = 1;
while(p < sta.firstSingle) { // p 小于单节点地址
if(sta.node[p << 1] == 0) { // 判断左子节点是否空闲
p = p << 1;
} else { // 判断右子节点是否空闲
p = (p << 1) | 1;
}
}
// 计算分配的物理页号 PPN
usize result = p - sta.firstSingle + sta.startPpn;
sta.node[p] = 1; // 标记为已分配
// 回溯更新父节点
p >>= 1;
while(p >> 0) {
sta.node[p] = sta.node[p << 1] & sta.node[(p << 1) | 1]; // 若左右子节点都不空闲,则父结点也不空闲
p >>= 1;
}
return result;
}- 同样也是从分配处向上回溯,修改节点的值,只不过只需要判断每个节点的子节点是否有空余即可。
5、回收页面:这部分与动态内存分配类似。
// kernel/memory.c
/*
* 回收物理页
* 输入物理页号 PPN
*/
void
dealloc(usize ppn)
{
// 计算页帧在线段树中的索引
usize p = ppn - sta.startPpn + sta.firstSingle;
// 如果页表已经空闲则不需要回收
if(sta.node[p] != 1) {
printf("The page is free, no need to dealloc!\n");
return;
}
// 标记为空闲
sta.node[p] = 0;
// 回溯更新父节点
p >>= 1;
while(p > 0) {
sta.node[p] = sta.node[p << 1] & sta.node[(p << 1) | 1];
p >>= 1;
}
}6、测试线段树的页帧分配
- 我们定义一个函数,用于同时初始化
本节的按页分配和3.2节的动态内存分配:
/*
* 初始化 页分配 和 动态内存分配
*/
void
initMemory()
{
// 初始化全局页帧分配器
initFrameAllocator(
// 起始PPN 是内核结束虚拟地址-内核起始虚拟地址 再加上 内核起始物理地址 = 内核结束物理地址
(((usize)(kernel_end) - KERNEL_BEGIN_VADDR + KERNEL_BEGIN_PADDR) >> 12) + 1,
// 终止页是物理内存的最后一个页
MEMORY_END_PADDR >> 12
);
// 初始化动态内存分配器
extern void initHeap(); initHeap();
printf("***** Init Memory *****\n");
}- 在
main()函数中编写一个测试函数:
// kernel/main.c
void
testAlloc()
{
printf("alloc %p\n", allocFrame());
usize f = allocFrame();
printf("alloc %p\n", f);
printf("alloc %p\n", allocFrame());
printf("dealloc %p\n", f);
deallocFrame(f);
printf("alloc %p\n", allocFrame());
printf("alloc %p\n", allocFrame());
}
void main()
{
extern void initInterrupt(); initInterrupt(); // 设置中断处理程序入口 和 模式
extern void initTimer(); initTimer(); // 时钟中断初始化
extern void initMemory(); initMemory(); // 初始化 页分配 和 动态内存分配
testAlloc();
while(1) {}
}- 得到如下输出,可以看到,刚被回收的物理页立刻又被分配出去了。
==== Init Interrupt ====
***** Init Memory *****
alloc 0x0000000080b22000
alloc 0x0000000080b23000
alloc 0x0000000080b24000
dealloc 0x0000000080b23000
alloc 0x0000000080b23000
alloc 0x0000000080b25000说明:
相信到这里,有些同学会觉得混乱、模糊,3.1、3.2节所讲述的动态内存分配和3.3、3.4节所讲述的页帧分配有什么区别?在内核中是怎么存放的?其实内核存放方式可以回到这张图
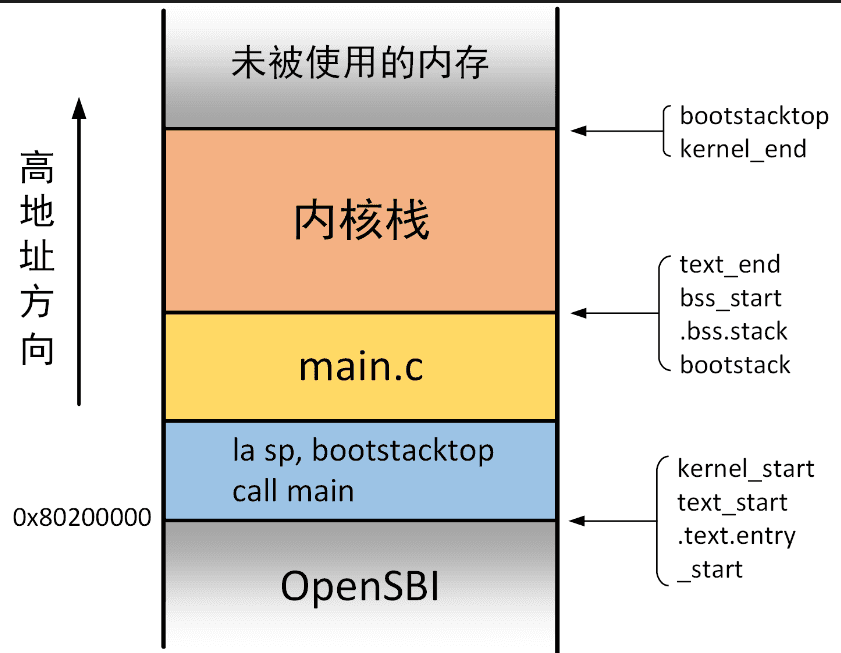
内核的存放方式定义在kernel.ld文件中,具体是:
0x80000000-0x80200000区间存放OpenSBI监管者二进制接口代码0x80200000-kernel_end开始分别存放kernel.ld文件中定义的text段、rodata字段、data段、bss段,最后直道内核结束位置kernel_end。我们可以将这个区域统称为操作系统内核。
就比如
3.1、3.2节所定义的8M堆区空间,heap.c代码被存放到这个区域的代码段,而HEAP则被存放到这个区域的.bss段,我们称其为内核堆(定义在 .bss 段上 8 MB 大小的字节数组)。故3.2节文末测试发现分配地址为0x0000000080311000
kernel_end-0x88000000这个区间即为未被使用的内存,也称为空闲内存
比如
3.3、3.4节所定义的全局页帧分配器FrameAllocator的地址就在这个范围里,故3.4节文末测试发现分配地址为0x0000000080b22000,比HEAP的地址大得多。